以发夹为灵感的快速软体机器人可以实现简单快速地移动
为了使软体机器人具有实用性,它必须简单、轻便、节能,但仍有合理的速度。一种新开发的机制符合这一要求,它的灵感来自于生活中常见的发夹。如果你曾经摆弄过发夹,你可能已经注意到它可以在两种稳定的配置之间来回弹动,只有凹陷和凸起两种状态。受这一功能的启发,哥伦比亚大学的一个科学家团队已经开发了所谓的发夹机制(HCM)。 ...

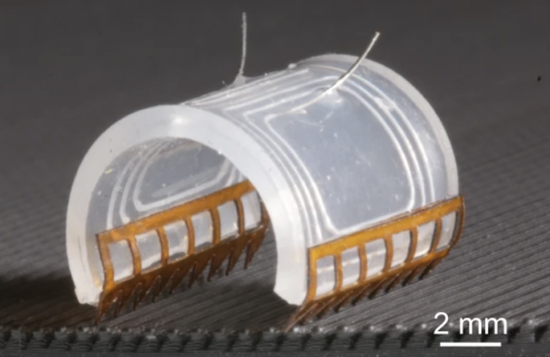
番茄酱瓶启发了设计移动软体机器人的新方法
塑料番茄酱瓶的盖子上有一个阀门,打开后可以让番茄酱流出,如果瓶子被挤压得太厉害,这个阀门有时会"喷出"。荷兰科学家复制了这一机制,创造了一个可用于自主软体机器人设备的执行装置。 ...
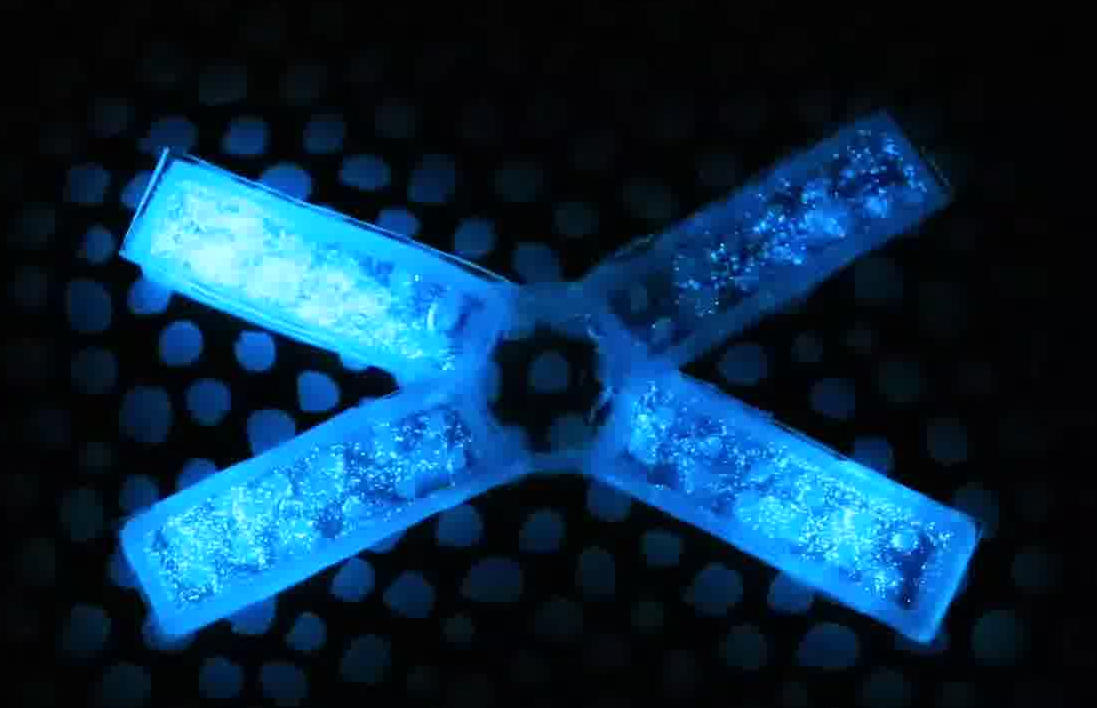
用活体甲藻打造的软体设备在被挤压或拉伸后会在黑暗中发亮
加州大学圣地亚哥分校的研究人员创造了含有海藻成分的软性设备,当受到机械压力时,例如被挤压、拉伸、扭曲或弯曲,它会在黑暗中发光。研究人员表示,这些设备非常适合于创建探索深海和其他黑暗区域的软体机器人,因为它们不需要任何电子元件就能发光。 ...

研究人员制作出史上最快的游泳软体机器人“Butterfly bots”
研究人员从蝠鲼的生物力学中获得灵感,开发了一种节能的软体机器人,其游泳速度比以前的游泳软体机器人快4倍以上。在北卡罗来纳州立大学(NCState)开发的这种机器人被称为"蝴蝶机器人",因为它们的游泳动作类似于人蝶泳时手臂的运动方式。 ...
毫米软体机器人会奔跑会游泳,堪比机器人领域的“小猎豹”
北京时间9月15日早间消息,据报道,目前,奥地利约翰内斯·开普勒大学科学家最新研制出能够高速奔跑、游泳和跳跃的可操控软体机器人,在测试过程中,机器人达到了每秒70倍体长的奔跑速度,该结果是令人惊奇的,因为即使是猎豹(地球上奔跑速度最快的陆地动物)也只能达到每秒23倍体长的速度! ...